Table of Contents
Links
Modeling Mode Coupling Instability for Brake Noise
Co-authored with Yago Bas Fernandez | Supervisor: Markus Sailer (BMW) | TUM
This project investigates the mode-coupling instability mechanism behind brake moan using a minimal model approach. Starting from a 2DOF friction oscillator, the work spans theoretical stability analysis, experimental calibration, and TMD countermeasure design.
The Problem
Brake moan (100–500 Hz) is a self-excited vibration caused by dynamic instability in the wheel brake system. Unlike stick-slip phenomena, mode-coupling instability can arise even with a constant friction coefficient — making it particularly insidious. The mechanism: friction forces introduce an asymmetric stiffness matrix, causing two structural eigenmodes to coalesce at a critical friction value μ_crit, after which one mode develops a positive growth rate (σ > 0) and vibrations amplify exponentially.
Minimal Model & Stability Analysis
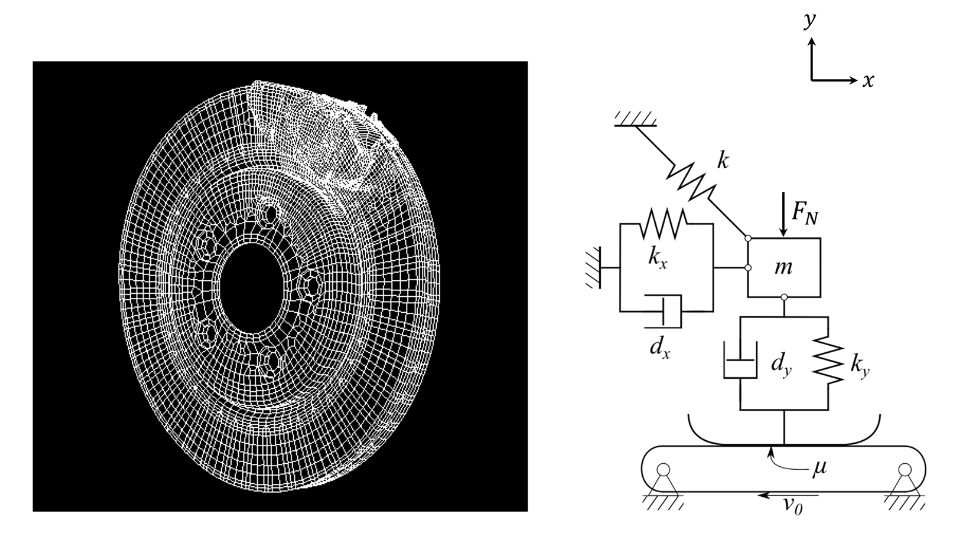
The core model is a 2DOF friction oscillator (Schroth, 2003) with orthogonal springs, dampers, and an angled coupling spring. Stability is assessed via eigenvalue analysis of the state-space matrix — the sign of the real part σ determines whether perturbations grow or decay.
For the baseline undamped system, the critical friction coefficient was found analytically: μ_crit = 0.362. Parameter studies showed that:
- Increasing coupling stiffness k or horizontal stiffness k_x drives the system toward coalescence
- Vertical stiffness k_y can restore stability by detuning the eigenfrequencies
- Viscous damping shifts the stability boundary to higher friction levels, delaying the onset of squeal
Time-domain simulations confirmed all three regimes — stable bounded oscillations, borderline coalescence, and exponentially diverging instability.
Calibration to Real Data
The model was calibrated to match a 260 Hz brake moan measured on a real brake caliper, targeting a growth rate of +12.8 s⁻¹. Nonlinear extensions (variable coupling angle β, time-harmonic stiffness variation) confirmed that parametric fluctuations crossing the stability boundary are sufficient to sustain and amplify instability even when stable intervals exist.
Tuned Mass Damper Design
A passive Tuned Mass Damper (TMD) was added to the vertical DOF to counteract the instability. The TMD oscillates out of phase with the primary system, dissipating energy through its local damper. A parameter study over mass ratio μ_TMD and damping ratio ζ_TMD identified the optimal configuration:
| Parameter | Value |
|---|---|
| Mass ratio μ_TMD | 5% |
| Damping ratio ζ_TMD | 10–15% |
This configuration places the system well within the stable region while minimising added weight. Robustness was validated under three transient scenarios — constant sinusoidal drift, progressive stiffness growth, and a full excursion-and-recovery cycle — confirming suppression even at stiffness ratio swings of ±30%.
Nondimensional Framework
Using the Buckingham Pi theorem, two dimensionless groups were identified as governing the instability:
- Π₁ = μ · K_N — the friction-coupling parameter (drives asymmetry)
- Π₂ = ω₁/ω₂ — the mode frequency ratio (instability peaks at Π₂ ≈ 1)
Stability maps in Π₁–Π₂ space and in the TMD design space (m_R vs ζ_TMD) generalise the results to any brake system with equivalent nondimensional parameters.